Wydział spawania korpusów podwozi gąsienicowych
W 2018 roku zorganizowano wydział spawania korpusów podwozi gąsienicowych. Wydział specjalizuje się w spawaniu korpusów pojazdów gąsienicowych ze stali specjalnych na specjalnie w tym celu zaprojektowanych i skonfigurowanych zrobotyzowanych stanowiskach wyposażonych w:
- Dwa roboty QRC 410 CLOOS o zasięgu ø 4020mm podwieszone na 2 portalach typu C z podłogowym torowiskiem przejezdnym
- Dwa pozycjonery dwukolumnowy o udźwigu 20000kg w rozstawie 11000mm i podnoszeniu w zakresie od 1200mm do 2700 mm
- Roboty wyposażone w sensor dyszy gazowej do odnajdywania spoiny, sensor łuku spawalniczego dla automatycznego śledzenia spoiny, detektory iCSE M do wykrywania geometrii rowka spawalniczego
- Stanowiska dodatkowe wyposażone w pozycjonery dwukolumnowe o udźwigu 20000 kg do wykonywania operacji przygotowania zespołów do spawania oraz uzupełniania korpusów o dodatkowe elementy
- Poszczególne zespoły korpusów spawane w zaprojektowanym specjalnym oprzyrządowaniu stanowiącym integralną część stanowisk

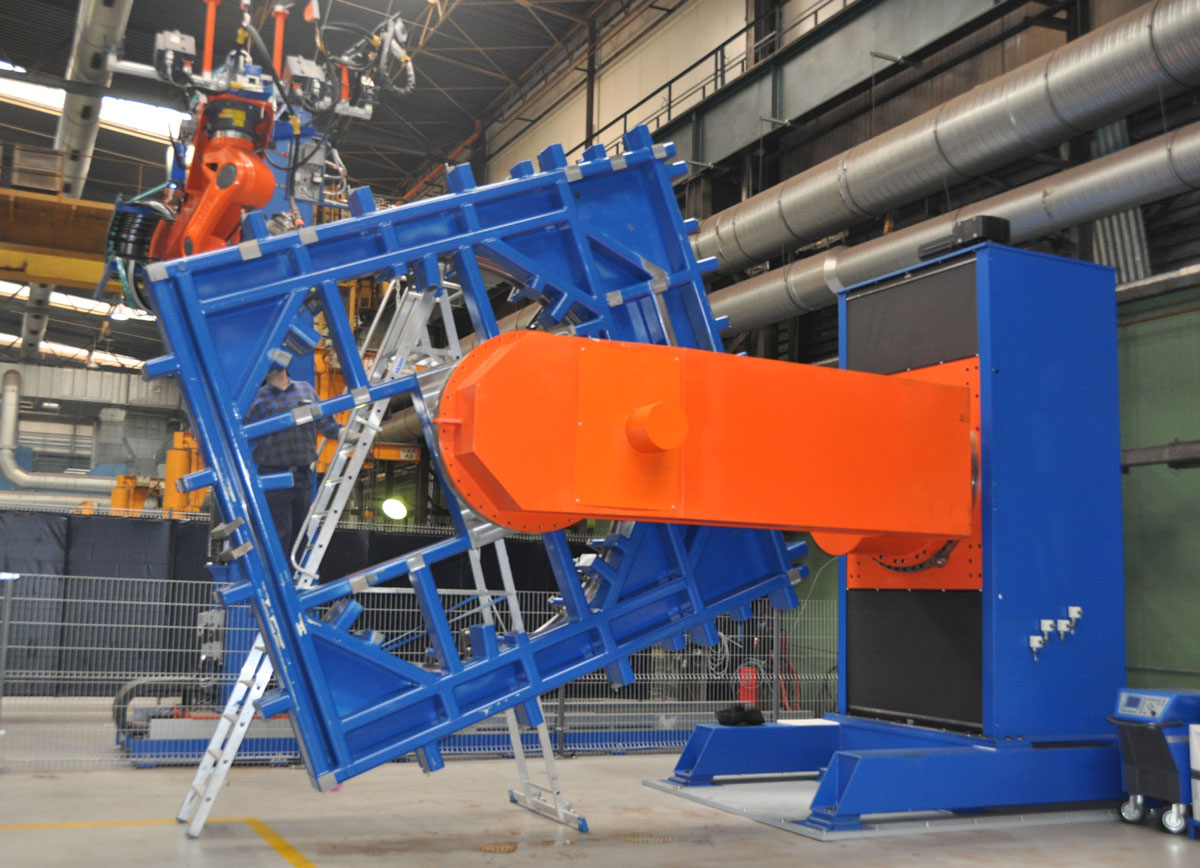
Stanowisko do spawania korpusów systemów wieżowych
Stanowisko do spawania korpusów systemów wieżowych ze stali specjalnych o odporności balistycznej (tzw. stali pancernych) wyposażone w:
- Robot QRC 410 o zasięgu ø 4020mm udźwig 10kg powtarzalność pozycjonowania poniżej 0,1 mm podwieszony na portalu typu C z podłogowym torowiskiem przejezdnym zamontowanym na posadzce o długości przejazdu około 5m, wyposażony w sensor dyszy gazowej do odnajdywania spoiny, sensor łuku spawalniczego dla automatycznego śledzenia spoiny, detektory iCSE M do wykrywania geometrii rowka spawalniczego
- Pozycjoner trzyosiowy o nośności 10000kg (długość ramienia 2700mm i podnoszenie 850mm)
- Zespoły korpusów systemów wieżowych spawane w zaprojektowanym specjalnym oprzyrządowaniu stanowiącym integralną część stanowiska